

- Tricopter KK-Décembre 2010
- Mes réglage MX12-Décembre 2010
- Reglage Gyro Telebee GR302-AD-Novembre 2010
- Binding Récepteur Assan-Novembre 2010
- DragonFly full Brushless-Octobre 2010
- [450] Choix pignon et moteur-Avril 2010
- [450] Reglage plateau cyclique-Mars 2010
- [450] Initialisation d’un ESC controleur-Janvier 2010
- [450] Config#1 du CopterX 450-Décembre 2009
- [450] Projet de construction Helico CopterX450 -Décembre 2009
- [450] Prix des pièces copterX 450 à monter-Décembre 2009
- [450] Initialisation HK-T6A avec HK-TR6A-Décembre 2009
Tricopter KK
par
Retour d’expérience sur la construction d’un Tricopter KK v6 : Ces infos ne sont en aucun cas des vérités, seulement mes observations
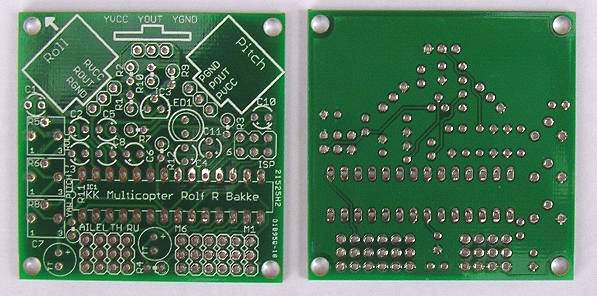
La carte utilisée :
Pour les sorties kk vers moteurs c’est :
- motor 1 = avant gauche
- motor 2 = avant droit
- motor 3 = arrière
- motor 4 = servo anticouple
Préparation
Déssoudage des gyros
Il faut récupérer les 3 composants gyros. Le premier essai m’a permis de comprendre comment faire les 2 autres :)
Ca ne sert à rien de trop chauffer (éviter même). Il faut une pompe à dessouder, chauffer chacune des 6 soudures du gyros pendant quelques secondes puis, aspirer la soudure avec la pompe. Une fois une partie de la soudure enlevée (on ne peut pas tout retirer, il suffit d’en virer juste un peu), on bouge délicatement la mini carte sur laquelle se trouve le composant du gyro afin de casser le restant de soudure. Ca marche très bien comme ca.
Soudage des gyros
Une fois les 3 petites cartes avec gyros déssoudées, il faut les souder sur la carte KK. Pour cela, j’ai utilisé les pattes de 3 résistances (sacrifiées pour l’occasion). Ca marche nickel.


Tests des gyros
Ayant un peu trop chauffé mon premier gyro, j’ai voulu tester l’état de ma carte KK avec les 3 gyros soudés. Pour celà, j’ai branché un ESC avec sa batterie sur la prise Motor1 puis Motor2 de la carte KK ainsi qu’un servo alternativement sur chacune des prises AIL/ELE/THR/RUDD pour vérifier que les mouvements de la carte agissaient sur la course du servo.
Tester le YAW => faire pivoter la carte sur elle même dans un plan horizontal
Tester le PITCH => faire pivoter la carte d’avant en arrière (sur l’axe traversant la carte de gauche à droite)
Tester le ROLL => faire pivoter la carte de gauche à droite (sur l’axe traversant la carte d’avant en arrière)
J’ai un problème persistent de servo qui buzz tout le temps (et chauffe énormément du coup...). Tous mes servos se comportent ainsi (c’est donc la carte qui semble poser problème... surement un des gyro...). Par contre, ils réagissent bien aux différents mouvements de la carte.
D’où peut venir ce gros bruit de fond ???? [EDIT : la réponse est un peu plus bas :) ]
AIL= roulis= ROLL
ELEV= tangage= PITCH
RUD= AC= YAW
THR= gaz
Ces résultats sont tirés de mon expérimentation :
| #Moteur | YAW | PITCH | ROLL |
|---|---|---|---|
| 1 | Y | Y | |
| 2 | Y | Y | |
| 3 | Y | Y | |
| 4 | Y | Y |
J’ai tésté les tensions aux 3 fils de chaque gyro. Visiblement, c’est la tension du fil central qui oscille entre la tension du premier et du troisième fil lorsque l’on bouge le gyro. La différence de potentiel tension entre le fil 1 et 3 est toujours de 4.52V
Après mesure, les 3 gyros se comportent de la même manière. Si ils ont un soucis, ce soucis ne les empêche pas de faire leur travail de gyro...
EDIT : J’ai compris d’où vient le problème. Le firmware de la KK ne doit pas être celui d’un tri mais d’un quadro ! La config du quadro est la suivante :
1
4+2
3
celui d’un tri
1 2
Y
3 (4)
Des nouvelles plus fraiches
Le Trico vole et même il vole très bien. C’est du tonnerre ce petit engin. Le pilotage savère être très semblable à celui d’un hélicopter en plus facile et surtout bine plus costaud. Dans 80% des cas de chute, le trico se relève indemne. Mon plus gros dêgat fut le guignol du servo qui était cassé (2 minutes à remplacer) et une héice à remplacer.
Voici quelques videos de vole : http://www.youtube.com/user/RCAltur...
Evolutions
Je compte mettre du materiel FPV Je suis en train de tester les config avec le proramme XX au lieu du KK.
Vous pouvez donner votre avis dans le FORUM du site.